
近日,工学院阚江明教授课题组完成的“BASL-AD SLAM: a robust deep-learning feature-based visual SLAM system with adaptive motion model”论文在工程技术领域Top期刊《IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS》(中国科学院一区TOP,IF="8.5)上发表,论文第一作者为工学院博士研究生韩军宇,第一通讯作者为董蕊芳副教授,第二通讯作者为阚江明教授,北京林业大学为文章第一完成单位,文章主要信息如下:
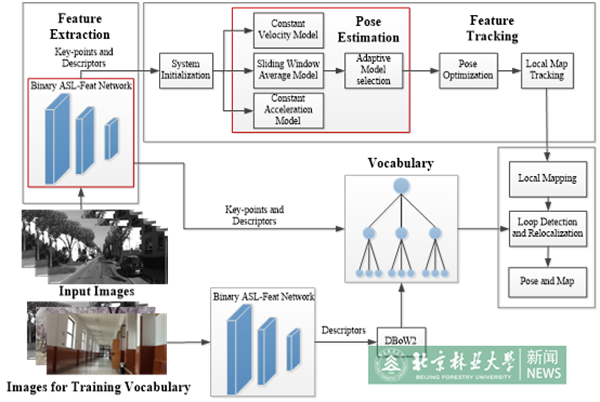
同步定位与建图简称SLAM,是机器人进行自主作业的前提。目前,基于视觉的SLAM是机器人实现自主导航的一种重要方式。当机器人面对如林区环境这样光照变化明显、地势复杂且纹理相似等场景,传统的视觉SLAM系统常出现特征匹配失败和精度下降等问题。为解决此问题,本研究对图像特征和运动模型进行研究。一方面提出Binary ASL-Feat网络提取图像特征和二进制描述符进行特征匹配,提高图像特征匹配的精度和鲁棒性;另一方面在恒速模型基础上增加恒加速模型与滑动平均模型,提出自适应模型选取最优相机初始位姿,提高视觉SLAM系统输出轨迹的精度。通过实验对比可知,本研究提出的BASL-AD SLAM系统在面对林区等复杂环境时依然可稳定的输出稀疏轨迹地图,且保持在良好的精度范围内,为后续智能机器人的自主作业提供依据。
该项工作得到了国家自然科学基金项目(62203059)和中央高校基本科研业务费资助(2021ZY72)等项目的资助。
文章链接:https://ieeexplore.ieee.org/document/10475131