
иҝ‘жңҹпјҢе·ҘеӯҰйҷўйҳҡжұҹжҳҺж•ҷжҺҲиҜҫйўҳз»„еңЁеҶңжһ—科еӯҰйўҶеҹҹдёҖеҢәTOPжңҹеҲҠгҖҠComputers and Electronics in AgricultureгҖӢпјҲIF="8.3пјүпјҢеҸ‘иЎЁдәҶе…ідәҺзү№з§Қжһ—дёҡиЈ…еӨҮзҡ„жңҖж–°з ”з©¶и®әж–ҮвҖңA" novel forestry information-collecting mobile systemвҖқгҖӮ
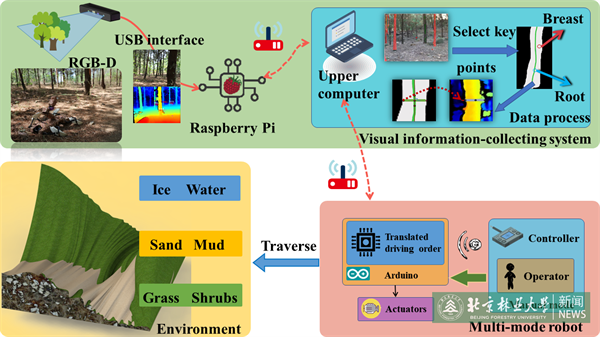
жһ—дёҡдҝЎжҒҜжҳҜжЈ®жһ—иө„жәҗз®ЎзҗҶгҖҒдёүз»ҙеҸҜи§ҶеҢ–е‘ҲзҺ°д»ҘеҸҠжҷәиғҪжһ—дёҡжңәеҷЁдәәзҺҜеўғж„ҹзҹҘзҡ„е…ій”®иҰҒзҙ гҖӮдёәжҸҗеҚҮдҝЎжҒҜйҮҮйӣҶдҪңдёҡзҡ„ж•ҲзҺҮпјҢз§‘з ”еӣўйҳҹз ”еҲ¶дәҶдёҖеҘ—еҹәдәҺеӨҡжЁЎејҸ移еҠЁжңәеҷЁдәәзҡ„иҮӘеҠЁеҢ–дҝЎжҒҜйҮҮйӣҶзі»з»ҹпјҲеӣҫ1пјүгҖӮеӨҡжЁЎејҸ移еҠЁжңәеҷЁдәәеҫ—зӣҠдәҺSchatzжңәжһ„зҡ„й©ұеҠЁи®ҫи®ЎпјҢиғҪиҪ»жқҫз©ҝи¶ҠжЈ®жһ—дёӯеҙҺеІ–еӨҡеҸҳзҡ„ең°еҪўгҖӮ且其移еҠЁжЁЎејҸеҲҮжҚўжҳҜдҫқиө–дәҺең°йқўдёҺжңәеҷЁдәәжҺҘи§ҰдҪҚзҪ®зҡ„еҸҳеҢ–пјҢиҖҢйқһдҫқиө–йўқеӨ–зҡ„жЁЎејҸеҲҮжҚўиЈ…зҪ®пјҢдҪҝеҫ—ж•ҙдёӘеҲҮжҚўиҝҮзЁӢз®ҖжҙҒиҖҢй«ҳж•ҲгҖӮжӯӨеӨ–пјҢи§Ҷи§үзҺҜеўғж„ҹзҹҘзі»з»ҹеҸҜйҖҡиҝҮжҚ•жҚүеӣҫеғҸдҝЎжҒҜпјҢд»ҺиҖҢзІҫеҮҶең°жҸҗеҸ–еҮәжүҖйңҖзҡ„жһ—дёҡдҝЎжҒҜгҖӮз»ҸиҝҮе®һйӘҢз ”з©¶пјҢжӯӨдҝЎжҒҜйҮҮйӣҶзі»з»ҹеңЁдҝЎжҒҜйҮҮйӣҶдҪңдёҡд»»еҠЎж–№йқўеұ•зҺ°еҮәдәҶеҚ“и¶Ҡзҡ„жөӢйҮҸзІҫеәҰе’Ңж•ҲзҺҮпјҢдёәжһ—дёҡи°ғжҹҘе·ҘдҪңеёҰжқҘдәҶжҳҫи‘—зҡ„дҫҝеҲ©гҖӮ
е·ҘеӯҰйҷўйқ’е№ҙж•ҷеёҲе§ҡиҲңдёәи®әж–Ү第дёҖдҪңиҖ…пјҢйҳҡжұҹжҳҺж•ҷжҺҲдёәйҖҡи®ҜдҪңиҖ…пјҢеҢ—дә¬жһ—дёҡеӨ§еӯҰдёә第дёҖе®ҢжҲҗеҚ•дҪҚпјҢиҜҘйЎ№е·ҘдҪңеҫ—еҲ°дәҶеӣҪ家иҮӘ然科еӯҰеҹәйҮ‘йЎ№зӣ®пјҲ62203059гҖҒ32071680пјүе’ҢеҚҡеЈ«еҗҺ科еӯҰеҹәйҮ‘йқўдёҠйЎ№зӣ®пјҲ2023M740278пјүзӯүйЎ№зӣ®зҡ„иө„еҠ©гҖӮ
ж–Үз« й“ҫжҺҘпјҡhttps://doi.org/10.1016/j.compag.2023.108606